During this block, I developed an Automated Root Phenotyping & Inoculation System for NPEC as part of my education at BUas. The Netherlands Plant Eco-phenotyping Centre is a research facility dedicated to plant phenotyping, studying the interaction between genetics and environment to secure future food sustainability. Their goal is to rapidly screen and identify robust, disease-resistant plant genotypes using automated modules. My task was to automate the inoculation process using computer vision, deep learning segmentation models, and simulate the robotic workflow with reinforcement learning.
Problem Definition
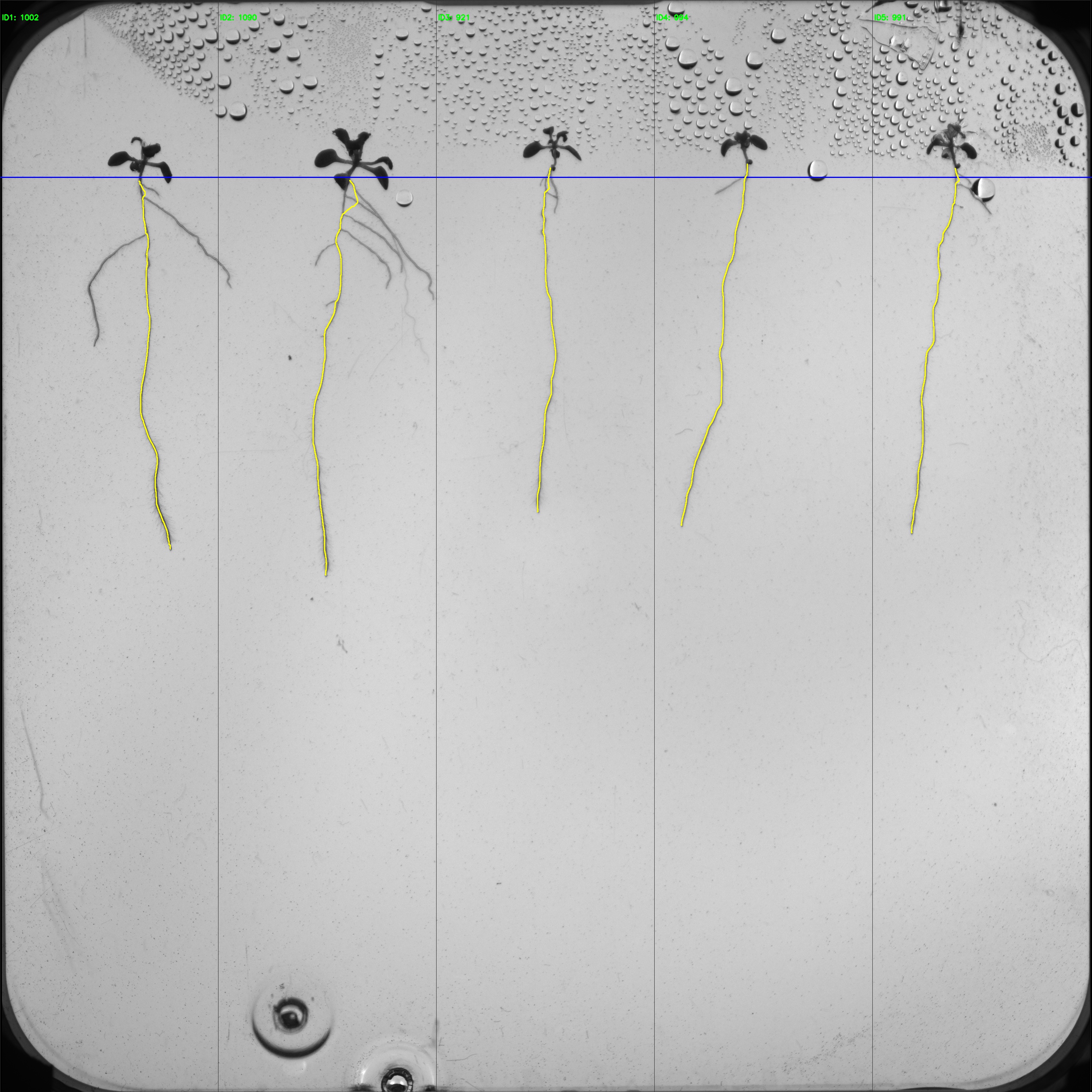
NPEC owns 7 state-of-the-art growth modules capable of generating massive amounts of data. However, the downstream analysis remains manual, creating a bottleneck. Valuable genetic data is lost due to fatigue, human error, or processing speed. The client’s focus for this project was Arabidopsis thaliana.
Project Goal
My solution provides a scalable and consistent workflow. Robots can be added based on the client’s budget, and inoculation accuracy reached 0.18mm in benchmarks. This reduced the time per Petri dish by 21×—from ~3.5 minutes for a skilled scientist to just 10 seconds per dish—allowing scientists to focus on experiment design while automating repetitive tasks. The system segments root systems from images and controls an Opentrons OT-2 liquid-handling robot for precise inoculation.
Project Scope and Workflow
This was an individual project, completed end-to-end from data exploration and model development to evaluation and reporting.
Data Preparation and Annotation
- Annotation: Created pixel-level annotations for three classes (shoot, seed, root) using LabKit, ensuring accurate root-shoot boundaries.
- Quality Control: Peer-reviewed annotations and created clean training/validation splits to prevent data leakage.
Baseline Computer Vision
- ROI Extraction: Applied color thresholding and contour detection with OpenCV to isolate Petri dishes and standardize inputs.
- Benchmarking: Established baseline performance and identified failure modes caused by lighting variations.
Deep Learning Modeling
- Architecture: Used SegFormer for semantic segmentation of roots and shoots.
- Training Strategy: Applied Albumentations for data augmentation to improve robustness.
Experiment Tracking and Evaluation
- MLOps: Tracked experiments with Weights & Biases (W&B), visualizing loss curves and monitoring metrics.
- Evaluation: Assessed segmentation quality through F1-scores and visual inspection of root tips for robotic targeting.
Robotics and Reinforcement Learning
- Simulation: Created a custom Gymnasium environment simulating the robot, defining continuous observation (pipette & goal positions) and action spaces (velocity).
- RL Agent: Trained a Soft Actor-Critic (SAC) agent using Stable Baselines 3.
- Reward Function: Dense reward based on negative Euclidean distance, with penalties for collisions and success bonuses.
System Integration
- Coordinate Mapping: Transformed pixel coordinates from SegFormer to physical robot coordinates.
- Validation: Simulated end-to-end inoculation, ensuring the RL agent could reach targets identified by the vision model.
Reflection and Iteration
- Optimized trade-offs between model complexity and inference speed.
- Refined RL reward functions for stable convergence.
- Enhanced data augmentation to resolve segmentation discontinuities.
Key Results
Computer Vision
- Root segmentation F1-score: 0.81
- Shoot segmentation F1-score: 0.93
- Primary root length sMAPE: 11.3% (measures relative percentage error between predicted and true values)
Robotics
- PID controller: 0.32mm accuracy, ~3s per plant
- RL controller: 0.18mm accuracy, ~1.2s per plant
Assumptions and Limitations
- Works for Petri dishes with ≤5 evenly spaced plants.
- Roots do not overlap.
- Fixed camera position and orientation.
- Limited to Arabidopsis thaliana; new plants require retraining the segmentation model.
- Real-world deployment requires additional tuning for PID and RL controllers.
Lessons Learned
Technical
- Classical CV is efficient for structural tasks like ROI detection.
- High-quality annotations are crucial for fine details like root tips.
- RL agents are highly sensitive to reward design; dense rewards improve convergence.
- Transformer-based models like SegFormer handle global context better than CNNs for complex biological structures.
Professional
- Client requirements (sMAPE targets, robotic precision) taught me to prioritize business objectives.
- Baseline-first workflow improves iterative development.
- Peer-reviewed annotations reinforced the importance of quality control.
- Vision models require robust integration logic to interface with physical systems effectively.
Conclusion
This project strengthened my interest in applied computer vision and demonstrated how machine learning interacts with physical systems in real-world scenarios.